近年、物流、インフラ点検、災害対応など様々な分野でマルチロータ型ドローンの活用が進んでいます。一方で、屋外環境では横風や突風によって飛行安定性が低下し、安全性や運用効率に影響を与えることが課題となっています。
本研究では、横風に強いマルチロータ機の実現を目指し、数値流体解析、飛行シミュレーション、ロータ設計および実験を組み合わせた研究を行いました。機体形状と横風によって発生する空力モーメントの関係を明らかにするとともに、その解析・設計を支援するソフトウェア群の開発に取り組みました。
Vortex Particle Methodの高速多重極展開による加速 -体球調和関数の基底関数への利用-
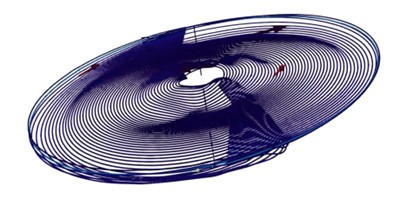
ロータ周囲の流れを効率よく解析するため、Vortex Particle Method(VPM)と呼ばれるメッシュフリー型の数値流体解析手法の研究を行いました。
特に、高速多重極展開法(Fast Multipole Method: FMM)の基底関数として体球調和関数を利用する新しい定式化を構築し、大規模な渦粒子計算を高速に実行可能なソフトウェアを開発しました。
この技術により、研究室レベルの計算環境でもロータ後流を効率的に解析することが可能となりました。
航空機用リム駆動スラスタの研究・開発
横風の影響を受けにくいロータシステムとして、リム駆動スラスタに着目しました。
リム駆動スラスタは、ブレード先端をリング状の構造で接続することで翼端渦を低減し、高効率化が期待できる推進システムです。また、横風に対する耐性向上も期待されています。
本研究では、固定ウェイク法を用いた高速な最適設計ソフトウェアを開発するとともに、実際にスラスタを設計・製作し、推力測定実験を実施しました。

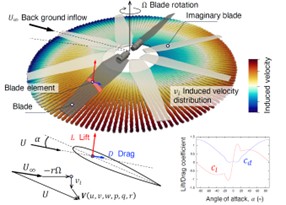
Dynamic Inflowを用いたマルチロータ機シミュレータの開発
マルチロータ機の運動を高精度かつ高速に解析するため、Dynamic Inflow理論を利用したロータ解析モデルを構築しました。
本モデルでは、ロータ後流の非定常な変化を考慮しながら、推力、トルク、消費電力などを計算することができます。また、失速やVortex Ring Stateといったロータ特有の現象も考慮可能です。
これらを統合し、機体形状や飛行条件を変更しながら飛行特性を評価できるシミュレータを開発しました。
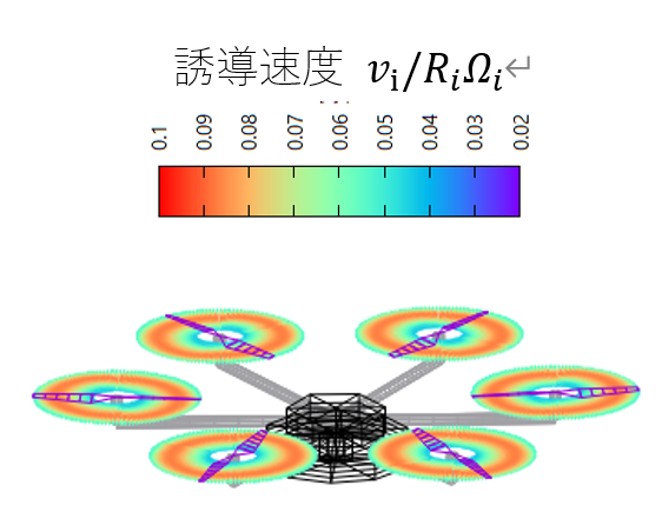
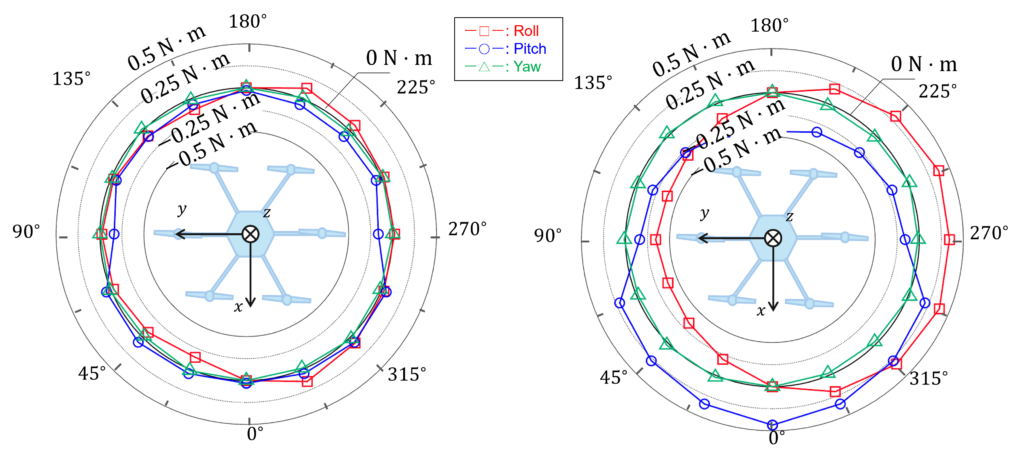
横風と機体形状の関係解析
開発したシミュレータを用いて、横風遭遇時に発生する空力モーメントと機体形状との関係を解析しました。
アーム長、ロータ取付角度、ロータ配置などの設計パラメータを変更しながら解析を実施し、横風耐性向上に有効な設計指針の取得を目指しました。
また、定常風だけでなく突風条件についても解析を行い、横風環境下における機体挙動の評価を実施しました。
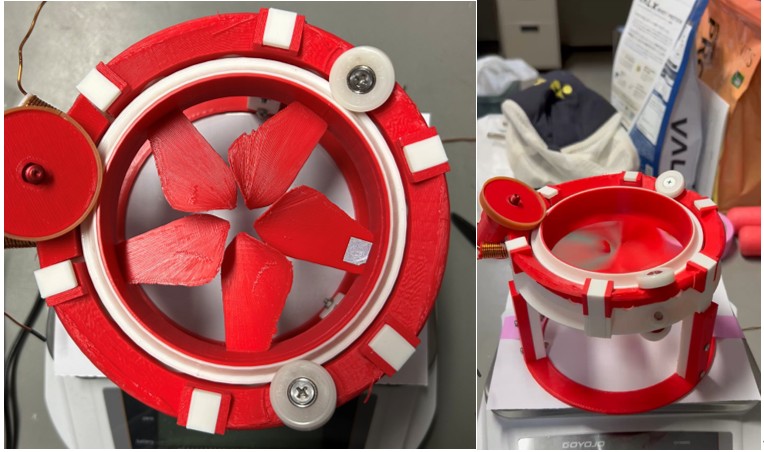
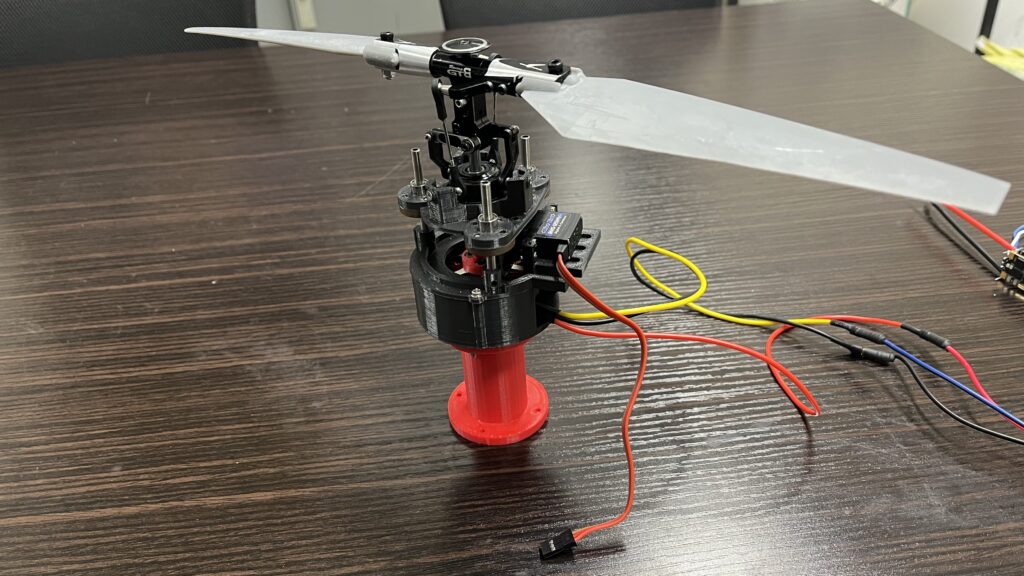
コレクティブピッチロータの開発
将来的な飛行実験を見据え、コレクティブピッチ機構を有する実験用ロータシステムの開発を行いました。
コレクティブピッチ機構は、ロータブレードの取付角度を変更することで推力を制御する方式であり、高い応答性や運動性能が期待できます。
本研究では、研究室レベルで製作可能な構造を目指し、3Dプリンタ部品と市販部品を組み合わせた実験装置を設計・試作しました。
今後の展望
本研究で開発した解析技術および設計技術は、物流ドローン、インフラ点検ドローン、災害対応用無人航空機などの設計への応用が期待されます。
今後は実機飛行試験との比較検証を進めるとともに、横風耐性に優れた次世代マルチロータ機の設計手法へ発展させる予定です。