Development of Dynamic Robotic Phantom System
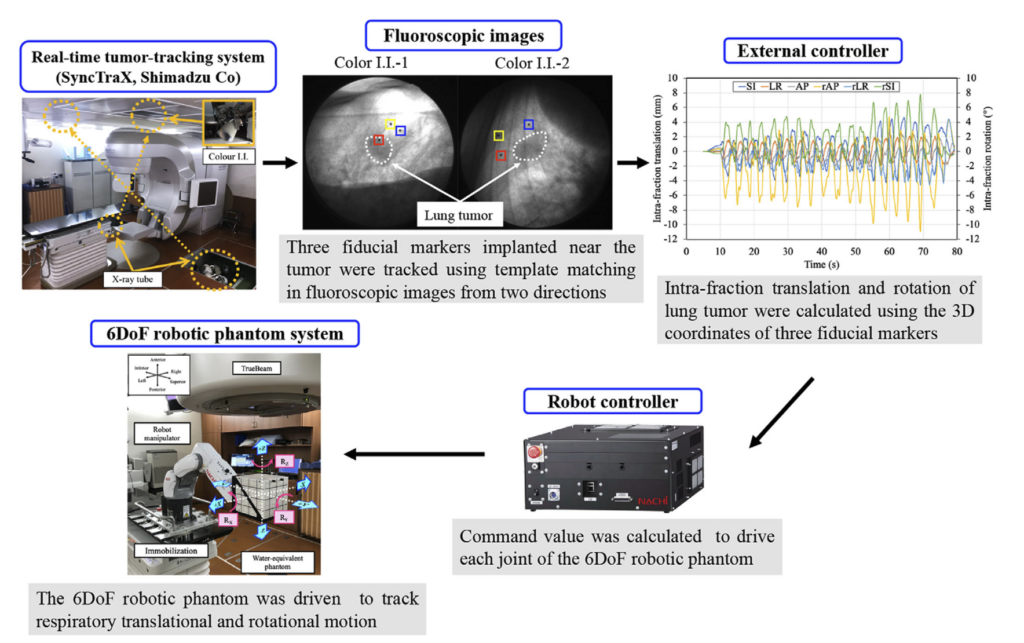
Radiotherapy techniques for treating sites with respiratory movement are complicated, such as real-time tumor-tracking irradiation and dynamic tracking irradiation, and quality control methods have not yet been established to ensure safe radiation therapy. We have developed a phantom that can reproduce the translational and rotational movements of the respiratory movement of a tumor using a robot with six degrees of freedom, and established a quality control method for radiotherapy. We are also developing a new radiation irradiation technique based on robotic technology.
Works
- A Novel dynamic robotic moving phantom system for patient-specific quality assurance in real-time tumor-tracking radiotherapy.
Shiinoki T, Fujii F, Fujimoto F, Yuasa Y, Sera T.
2020 Jul;21(7):16-28. doi: 10.1002/acm2.12876. Epub 2020 Apr 13. - Analysis of dosimetric impact of intrafraction translation and rotation during respiratory-gated stereotactic body radiotherapy with real-time tumor monitoring of the lung using a novel six degrees-of-freedom robotic moving phantom.
Shiinoki T, Fujii F, Yuasa Y, Nonomura T, Fujimoto K, Sera T, Tanaka H.
Med Phys.2020 Sep;47(9):3870-3881. doi: 10.1002/mp.14369. Epub 2020 Jul 28.
winning (a prize)
- The American Association of Physicists in Medicine 60th Annual meeting “Best in Physics award”
4D dynamic robotic phantom system for patient-specific quality assurance in real-time tumor-tracking radiotherapy
T.Shiinoki, F.Fujii, K. Fujimoto, Y.Yuasa, T.Uehara, T.Sera, R.Onizuka - The American Association of Physicists in Medicine “Medical Physics Notable paper in the September 2020”
Analysis of dosimetric impact of intrafraction translation and rotation during respiratory-gated stereotactic body radiotherapy with real-time tumor monitoring of the lung using a novel six degrees-of-freedom robotic moving phantom.
Shiinoki T, Fujii F, Yuasa Y, Nonomura T, Fujimoto K, Sera T, Tanaka H.
patent
-
ロボット動体ファントムシステム
藤井 文武,椎木健裕